Instrument
Le sismomètre SEIS est basé sur un instrument hybride de six axes composé :
- d'une sphère comportant trois capteurs sismiques très large bande (Very Broad Band - VBB) et leurs capteurs de température,
 de trois capteurs sismiques courtes périodes (Short Period - SP) et leurs capteurs de température,
de trois capteurs sismiques courtes périodes (Short Period - SP) et leurs capteurs de température,- d'une boîte électronique d'acquisition (e-box : SEIS AC, SEIS DC/DC, ASICS) et les cartes de contre-réaction des capteurs VBB, SP et du système de déploiement MDE,
- d'un système de déploiement (DPL),
- d'un logiciel (S/W).
Sa masse est d'environ 3 kg.
Sa consommation varie autour de 1W selon les modes.
Les principales performances du sismomètre SEIS sont :
VBB -9 m.s-² Hz-½ de 10-³ jusqu'à 10 Hz
SP < 5 10-8 m.s-² Hz-½ de 10-² jusqu'à 100 Hzx
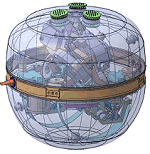
La sphère
La sphère abrite les capteurs VBB (ou sismomètres longue période). C'est la "partie noble" de l'instrument. Elle comporte des servitudes pour permettre le meilleur fonctionnement possible des capteurs VBB
- Elle intègre un écran thermique et des plots torlon pour réduire au maximum les variations de températures des sismomètres
- Elle maintient les capteurs sous vide
- Elle contient des capteurs de températures (Housse Keeping - HK) et des inclinomètres permettant l'exploitation des données mesurées par les VBB.
Les capteurs large-bande (VBB) sont des pendules obliques (voir la figure ci-dessous).
Le principe de fonctionnement :
Le ressort et le poids du pendule s'équilibrent parfaitement. Lorsque le sol bouge, le pendule se met en mouvement. Ce mouvement est capté par le capteur DCS. Le mécanisme d'équilibrage permet d'ajuster l'équilibre du pendule aux conditions d'utilisation réelles (gravité mal connue, défaut de nivellement, influence de la température sur l'équilibre du pendule). Le pivot doit permettre la rotation de la partie mobile autour de son axe sans exercer le moindre frottement.
![]()
Le capteur de déplacement est constitué d'électrodes placées sur la partie fixe et sur la partie mobile. Les caractéristiques électriques de l'ensemble ainsi constitué (la capacité) forment une image de la position de la partie mobile du capteur.
L'électronique de proximité permet de transformer ces caractéristiques en une tension facilement mesurable. C'est cette tension qui est transmise à l'électronique d'acquisition. La bobine de contre-réaction permet l'asservissement du pendule pour en améliorer les performances (augmentation de la bande-passante). L'intensité qui parcourt la bobine est délivré par la carte de contre-réaction "SEIS-FB" située dans l'e-box. Cette intensité est générée en fonction de la mesure de déplacement du pendule.
Les capteurs courte-période
![]() Les trois capteurs courte-période enregistrent l'accélération du sol le long de leurs axes de sensibilité. Le mouvement d'une masse mobile est détecté par un capteur à détection synchrone. Pour étendre la bande passante, la masse mobile est verrouillée sur zéro grâce à la boucle de contre-réaction, qui agit sur un actionneur magnétique de type bobine-aimant. La boucle de contre-réaction contrôle le courant injecté dans la bobine, elle-même plongée dans un champ constant.
Les trois capteurs courte-période enregistrent l'accélération du sol le long de leurs axes de sensibilité. Le mouvement d'une masse mobile est détecté par un capteur à détection synchrone. Pour étendre la bande passante, la masse mobile est verrouillée sur zéro grâce à la boucle de contre-réaction, qui agit sur un actionneur magnétique de type bobine-aimant. La boucle de contre-réaction contrôle le courant injecté dans la bobine, elle-même plongée dans un champ constant.
Le système de déploiement
La structure de déploiement est composée d'un cadre portant trois pieds déployables et la sphère. Le support de la sphère doit assurer une inclinaison de ±18° à l'intérieur du lander. Deux approches sont envisagées pour le système de déploiement : un système cardanic (composé d'un anneau de cardan et de deux moteurs) et un système à trois axes (vis-écrous). Enfin, un système permet de faire descendre le sismomètre au sol.
Le logiciel de vol
C'est l'un des logiciels qui sera exécuté sur l'ordinateur de bord du lander (CDMS). Il interagit avec le sismomètre et le lander afin de stocker les données dans la mémoire de masse et les communiquer à la terre.
Ses fonctions principales sont les suivantes :
- Assurer le bon état de fonctionnement de l'instrument
- Enregistrer les données sismiques
- Réaliser les traitements (compression)
- Gérer les Télécommandes (TC) reçues
- Renvoyer les données pertinentes par Télémesures (TM).
Le logiciel reçoit et interprète les commandes envoyées depuis le sol (TC). C'est lui qui déclenche le déploiement de l'instrument et permet toute la séquence d'installation (nivellement de la sphère, recentrage des sismomètres VBB) du sismomètre à la surface de Mars.
Une fois SEIS installé et prêt pour l'expérience de sismologie, le logiciel passe en mode opérationnel. Il a alors pour rôle la gestion de l'instrument et la récupération des données.
La gestion de l'instrument consiste à passer d'un mode à un autre pour ajuster le fonctionnement du sismomètre aux ressources disponibles (ex : mode "winter" lorsque la puissance électrique disponible est faible, ou mode "campaign" pour maximiser le retour scientifique lorsque cela est possible).
Pour récupérer les données, le logiciel effectue plusieurs tâches :
- L'enregistrement et la compression des mesures pour minimiser l'espace mémoire occupé
- La génération de "quick look data". Ces données fortement compressées sont systématiquement envoyées vers la terre. Elles permettent de repérer les instants où se produisent des événements sismiques intéressants.
- Le renvoi (en télémesure) des mesures brutes (sans perte d'information) correspondant à des périodes choisies par les scientifiques
- La suppression des données inutiles
La complexité du logiciel de vol provient de l'automatisation de toutes les opérations sur le sismomètre, de la faible puissance électrique disponible et enfin du volume de données à stocker. En effet, la sismologie nécessite d'enregistrer des mesures en continu, du fait de l'impossibilité de prévoir à l'avance les séismes. Le volume de données ainsi enregistrées est donc bien supérieur aux capacités de transmissions entre Mars et la Terre.


